The Bow-Tie space is the continuous image of a separable metric space and yet is not metrizable (see here). Though taking continuous image can fail to preserve separable metrizability, we show that the perfect image of a separable metric space is a separable metric space. We prove the following theorem, which says that under a perfect map the weight will not increase. The result about separable metric space is a corollary of Theorem 1.
Theorem 1
Let  be a perfect map onto the space
be a perfect map onto the space  . Then
. Then  , i.e., the weight of is no greater than the weight of
, i.e., the weight of is no greater than the weight of  .
.
Proof of Theorem 1
All spaces under consideration are Hausdorff. Let and be spaces. Let  be a map (or function) from onto . The map
be a map (or function) from onto . The map  is said to be a closed map if
is said to be a closed map if  is closed in for any closed subset
is closed in for any closed subset  of . The map is a perfect map if is continuous, is a closed map, and
of . The map is a perfect map if is continuous, is a closed map, and  is compact for every
is compact for every  . In words, the last condition is that every point inverse is compact. A point inverse is also referred to as a fiber. Thus, we can say that a perfect map is a continuous closed surjective map with compact fibers. The following lemma is helpful for proving Theorem 1.
. In words, the last condition is that every point inverse is compact. A point inverse is also referred to as a fiber. Thus, we can say that a perfect map is a continuous closed surjective map with compact fibers. The following lemma is helpful for proving Theorem 1.
Lemma 2
Let be a closed map such that  . Let
. Let  be open. Let
be open. Let  . Then
. Then  is open in and
is open in and  .
.
Proof of Lemma 2
We show that  is closed in . To this end, we show
is closed in . To this end, we show  . Note that
. Note that  is closed in since is a closed map. First, we show
is closed in since is a closed map. First, we show  . Let
. Let  . Then
. Then  for some
for some  . Since
. Since  and
and  , we have
, we have  . This implies that
. This implies that  .
.
We now show that  . Let
. Let  . Since
. Since  ,
,  . Choose
. Choose  , which implies that . Thus,
, which implies that . Thus,  .
.
To complete the proof of the lemma, we show . Let  . We have
. We have  . As a result,
. As a result,  for some
for some  .
. 
Proof of Theorem 1
Let  be a base for . We derive a base
be a base for . We derive a base  for such that
for such that  , i.e., the cardinality of is no more than the cardinality of . This implies that the minimal cardinality of a base in is no more than the minimal cardinality of a base in , i.e., .
, i.e., the cardinality of is no more than the cardinality of . This implies that the minimal cardinality of a base in is no more than the minimal cardinality of a base in , i.e., .
We assume that the base is closed under finite unions. We show that  is a base for . Note that
is a base for . Note that  is defined in Lemma 2. Let
is defined in Lemma 2. Let  be an open set. Let
be an open set. Let  . For each
. For each  , choose
, choose  such that
such that  and
and  . Since is compact, there exists finite
. Since is compact, there exists finite  such that
such that  . Note that
. Note that  . Since
. Since  , we have
, we have  . We also have
. We also have  . Thus, every open subset
. Thus, every open subset  of is the union of elements of . This means that is a base for . Theorem 1 is established.
of is the union of elements of . This means that is a base for . Theorem 1 is established.
Corollary 3
Let be a perfect map onto the space . Then if is a separable metric space, then is a separable metric space.
Comment About Lemma 2
A perfect map is not necessarily an open map. If the perfect map in Theorem 1 is an open map, then Lemma 2 is not needed and  would be a base for . However, we cannot assume is an open map simply because it is a perfect map. To see this, let
would be a base for . However, we cannot assume is an open map simply because it is a perfect map. To see this, let  be the real line with the usual topology. Collapse the closed interval
be the real line with the usual topology. Collapse the closed interval ![[1,2]](https://s0.wp.com/latex.php?latex=%5B1%2C2%5D&bg=ffffff&fg=333333&s=0&c=20201002) to one point called
to one point called  . The resulting quotient space is where
. The resulting quotient space is where  . In , the open neighborhoods of points in
. In , the open neighborhoods of points in  are the usual Euclidean neighborhoods. The open neighborhoods of the point are the usual Euclidean open sets containing the interval . The resulting quotient map is an identity map on and it maps points in to the point . It can be verified that is a perfect map. For the open set
are the usual Euclidean neighborhoods. The open neighborhoods of the point are the usual Euclidean open sets containing the interval . The resulting quotient map is an identity map on and it maps points in to the point . It can be verified that is a perfect map. For the open set  ,
,  , which is not open in . For the open set
, which is not open in . For the open set  ,
,  , which is not open in . Lemma 2 says that for any open
, which is not open in . Lemma 2 says that for any open  ,
,  may not be open but has an open subset if has non-empty interior. The interior sets can work as a base in .
may not be open but has an open subset if has non-empty interior. The interior sets can work as a base in .
Invariant and Inverse Invariant
Let  be a property of topological spaces. We say that is an invariant of the perfect maps or that is invariant under the perfect maps if the property is preserved by perfect maps, i.e., for each perfect map where
be a property of topological spaces. We say that is an invariant of the perfect maps or that is invariant under the perfect maps if the property is preserved by perfect maps, i.e., for each perfect map where  , if the space has , so does . On the other hand, is an inverse invariant of the perfect maps if this holds: for each perfect map where , if has , so does .
, if the space has , so does . On the other hand, is an inverse invariant of the perfect maps if this holds: for each perfect map where , if has , so does .
The notions invariant and inverse invariant defined here are for perfect maps. In general, the notions are much broader and can be defined in relation to any class of continuous maps. For example, we know that the continuous image of a separable space is separable. We can say that separability is an invariant of the continuous maps or that separability is invariant under continuous maps. We can now restate Theorem 1 and Corollary 3 as follows.
Theorem 4…..Restatement of Theorem 1
The property “weight  ” is an invariant of the perfect maps.
” is an invariant of the perfect maps.
Corollary 5
The second axiom of countability is invariant under the perfect maps, but is not an invariant of the continuous maps.
The Bow-Tie space is the continuous image of a separable space but cannot have a countable base (see here). In light of Theorem 1, the continuous map that maps a separable metric space to the Bow-Tie space (shown here) cannot be a perfect map. With respect to that map, the upper half plane in the domain (the separable metric space) is closed but its continuous image in the Bow-Tie space is open and not closed.

Dan Ma Bow-Tie space
Daniel Ma Bow-Tie space
Dan Ma perfect map
Daniel Ma perfect map
Dan Ma separable metric space
Daniel Ma separable metric space
Dan Ma topology
Daniel Ma topology
 2023 – Dan Ma
2023 – Dan Ma
Revised March 31, 2023
Revised March 12, 2024

 -space.
-space. of subsets of
of subsets of  and for each open set
and for each open set  containing
containing  , there exists
, there exists  such that
such that  . A network behaves like a base but the elements of the network do not have to be open sets. Of interest are the spaces with a countable network. Compact spaces with a countable network is metrizable. Any space with a countable network is both hereditarily separable and hereditarily Lindelof. The space
. A network behaves like a base but the elements of the network do not have to be open sets. Of interest are the spaces with a countable network. Compact spaces with a countable network is metrizable. Any space with a countable network is both hereditarily separable and hereditarily Lindelof. The space  with
with  . Let
. Let  be the x-axis, which is the set of all pairs of real numbers
be the x-axis, which is the set of all pairs of real numbers  . The bow-tie space is the set
. The bow-tie space is the set  with the topology defined as follows.
with the topology defined as follows. with
with  . Each set
. Each set  having Euclidean distance less than
having Euclidean distance less than  from
from  , respectively.
, respectively.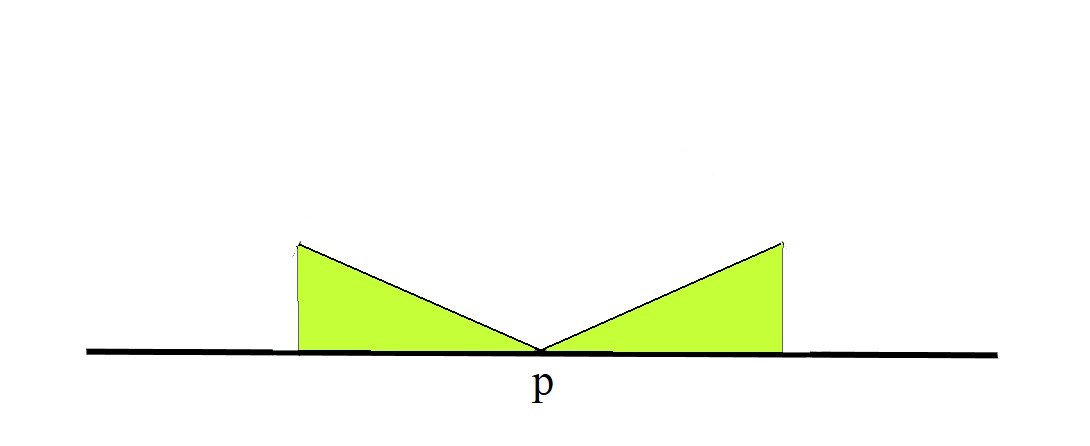
 be countable bases for
be countable bases for  is a network for the Bow-Tie space
is a network for the Bow-Tie space  be the upper half plane
be the upper half plane  be the x-axis
be the x-axis  , the free sum or free union. This means that
, the free sum or free union. This means that  is open if and only if both
is open if and only if both  and
and  are open. It follows that the identity map from
are open. It follows that the identity map from  onto the Bow-Tie space
onto the Bow-Tie space  ,
,  ,
,  ,
,  . Pick
. Pick  such that
such that  for all
for all  . Consider
. Consider  . Since
. Since  . This means that both the left side and the right side of the bow-tie in
. This means that both the left side and the right side of the bow-tie in  are within
are within  -space. It is well known that any space with a countable network is a Lindelof
-space. It is well known that any space with a countable network is a Lindelof  , the function space with the pointwise convergence topology on the Bow-Tie space
, the function space with the pointwise convergence topology on the Bow-Tie space  is a Lindelof
is a Lindelof  is a hereditarily D-space.
is a hereditarily D-space. ,
,  . In particular, any compact space with a countable network is metrizable.
. In particular, any compact space with a countable network is metrizable. for any compact
for any compact  (Hausdorff and regular). Let
(Hausdorff and regular). Let  of subsets of
of subsets of  and for each open
and for each open  with
with  , then we have
, then we have  for some
for some  . The network weight of a space
. The network weight of a space  , is defined as the minimum cardinality of all the possible
, is defined as the minimum cardinality of all the possible  where
where  , is defined as the minimum cardinality of all possible
, is defined as the minimum cardinality of all possible  where
where  is a base for
is a base for  . For any compact space
. For any compact space  .
. be the topology for the space
be the topology for the space  . We can find a base
. We can find a base  that generates a weaker (coarser) topology such that
that generates a weaker (coarser) topology such that  . We can also find a base
. We can also find a base  that generates a finer topology such that
that generates a finer topology such that  . These are restated as lemmas.
. These are restated as lemmas. on
on  .
. such that
such that  . Consider all pairs
. Consider all pairs  such that there exist disjoint
such that there exist disjoint  with
with  and
and  . Such pairs exist because we are working in a Hausdorff space. Let
. Such pairs exist because we are working in a Hausdorff space. Let  and their finite interections. This is a base for a topology and let
and their finite interections. This is a base for a topology and let  and this is a Hausdorff topology. Note that
and this is a Hausdorff topology. Note that  .
. on
on  .
. . It is also clear that
. It is also clear that  always holds. For compact spaces, we have
always holds. For compact spaces, we have  .
. denote
denote  be a continuous function mapping a separable metric space
be a continuous function mapping a separable metric space  is a network for
is a network for  . It follows that
. It follows that  set. Let
set. Let  set (thus every closed set is a
set (thus every closed set is a  where
where and
and .
. have the usual plane open neighborhoods. A basic open set at
have the usual plane open neighborhoods. A basic open set at  is of the form
is of the form  where
where  and all points
and all points  having distance
having distance  from
from  and
and  coincide with the usual topology on
coincide with the usual topology on  spaces, J. Math. Mech. 15, 983-1002.
spaces, J. Math. Mech. 15, 983-1002.