
The Sorgenfrey line is a well known topological space. It is the real number line with open intervals defined as sets of the form 
The next post is a continuation on the theme of drawing Sorgenfrey continuous functions.
The Sorgenfrey Line
Let 


Now tweak the usual topology by calling sets of the form 

Note that any usual open interval 
Let 




Pictures of Continuous Functions
Consider the following two continuous functions.

Figure 1 – CDF of the standard normal distribution

Figure 2 – CDF of the uniform distribution
The first one (Figure 1) is the cumulative distribution function (CDF) of the standard normal distribution. The second one (Figure 2) is the CDF of the uniform distribution on the interval 

Consider a function that is continuous in the Sorgenfrey line but not continuous in the usual topology.

Figure 3 – Right continuous function
Figure 3 is a function that maps the interval 


The cumulative distribution function of a discrete probability distribution is always right continuous, hence continuous in the Sorgenfrey line. Here’s an example.

Figure 4 – CDF of a discrete uniform distribution
Figure 4 is the CDF of the uniform distribution on the finite set 
The take away from the last four figures is that the real-valued continuous functions defined on the Sorgenfrey line are right continuous and that step functions (with the left point solid and the right point hollow) are Sorgenfrey continuous.
A Family of Sorgenfrey Continuous Functions
The four examples of continuous functions shown above are excellent examples to illustrate the Sorgenfrey topology. We now introduce a family of continuous functions 

For any 
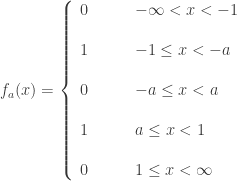

Figure 5 – a family of Sorgenfrey continuous functions
Function Space on the Sorgenfrey Line
This is the place where we switch the focus to function space. The set 

For the present discussion, all we need is some notation on a base for 
![[x,(a,b)]=\left\{h \in C_p(\mathbb{S}): h(x) \in (a, b) \right\}](https://s0.wp.com/latex.php?latex=%5Bx%2C%28a%2Cb%29%5D%3D%5Cleft%5C%7Bh+%5Cin+C_p%28%5Cmathbb%7BS%7D%29%3A+h%28x%29+%5Cin+%28a%2C+b%29+%5Cright%5C%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![[x,(a,b)]](https://s0.wp.com/latex.php?latex=%5Bx%2C%28a%2Cb%29%5D&bg=ffffff&fg=333333&s=0&c=20201002)
The following is the main fact we wish to establish.
The function space 
The above result will derive several facts on the function space
I invite readers to either verify the fact independently of the proof given here or follow the proof closely. Lots of drawing of the functions
Working out the Proof
The following diagram was helpful to me as I worked out the different cases in showing the discreteness of the family

Figure 6 – A comparison of three Sorgenfrey continuous functions
Now the proof. First, 




![O=[a,V_1] \cap [-a,V_2]](https://s0.wp.com/latex.php?latex=O%3D%5Ba%2CV_1%5D+%5Ccap+%5B-a%2CV_2%5D&bg=ffffff&fg=333333&s=0&c=20201002)








The open set 



Now we show that
-
for each
 , there is an open set
, there is an open set  containing
containing  such that contains at most one point of .
such that contains at most one point of .
Actually, this has already been done above with points 
Case 1. There exists some 

We assume that 



![U=[a,(-0.1,0.1)] \cap [-a,(0.9,1.1)]](https://s0.wp.com/latex.php?latex=U%3D%5Ba%2C%28-0.1%2C0.1%29%5D+%5Ccap+%5B-a%2C%280.9%2C1.1%29%5D&bg=ffffff&fg=333333&s=0&c=20201002)





Case 2. For every 
Claim. The function 













It follows that 







Now suppose we have 


It follows that 



The claim that the function ![U=[0,(0.9,1.1)]](https://s0.wp.com/latex.php?latex=U%3D%5B0%2C%280.9%2C1.1%29%5D&bg=ffffff&fg=333333&s=0&c=20201002)

![U=[-1,(-0.1,0.1)]](https://s0.wp.com/latex.php?latex=U%3D%5B-1%2C%28-0.1%2C0.1%29%5D&bg=ffffff&fg=333333&s=0&c=20201002)
We have established that the set
What does it Mean?
The above argument shows that the set
| Three Results |
|
To show that 



Secondly,
Thirdly,
Remarks
The topology of the Sorgenfrey line is vastly different from the usual topology on the real line even though the the Sorgenfrey topology is obtained by a seemingly small tweak from the usual topology. The real line is a metric space while the Sorgenfrey line is not metrizable. The real number line is connected while the Sorgenfrey line is not. The countable power of the real number line is a metric space and thus a normal space. On the other hand, the Sorgenfrey line is a classic example of a normal space whose square is not normal. See here for a basic discussion of the Sorgenfrey line.
The pictures of Sorgenfrey continuous functions demonstrated here show that the real number line and the Sorgenfrey line are also very different from a function space perspective. The function space
Though separable, the function space
For more information about
The next post is a continuation on the theme of drawing Sorgenfrey continuous functions.
Reference
- Arkhangelskii, A. V., Topological Function Spaces, Mathematics and Its Applications Series, Kluwer Academic Publishers, Dordrecht, 1992.
- Tkachuk V. V., A
-Theory Problem Book, Topological and Function Spaces, Springer, New York, 2011.


A strategy for finding CCC and non-separable spaces
In this post we present a general strategy for finding CCC spaces that are not separable. As illustration, we give four implementations of this strategy.
In searching for counterexamples in topology, one good place to look is of course the book by Steen and Seebach [2]. There are four examples of spaces that are CCC but not separable found in [2] – counterexamples 20, 21, 24 and 63. Counterexamples 20 and 21 are not Hausdorff. Counterexample 24 is the uncountable Fort space (it is completely normal but not perfectly normal). Counterexample 63 (Countable Complement Extension Topology) is Hausdorff but is not regular. These are valuable examples especially the last two (24 and 63). The examples discussed below expand the offerings in Steen and Seebach.
The discussion of CCC but not separable in this post does not use axioms beyond the usual axioms of set theory (i.e. ZFC). The discussion here does not touch on Suslin lines or other examples that require extra set theory. The existence of Suslin lines is independent of ZFC. A Suslin line would produce an example of a perfectly normal first countable CCC non-separable space. In models of set theory where Suslin lines do not exist, a perfectly normal first countable CCC non-separable space can also be produced using other set-theoretic assumptions. The examples discussed below are not as nice as the set-theoretic examples since they usually are not first countable and perfectly normal.
____________________________________________________________________
The countable chain conditon
A topological space 





It is clear that any separable space has the CCC. In metric spaces, these two properties are equivalent. Among topological spaces in general, the two properties are not identical. Thus “CCC but not separable” is one way to distinguish between metrizable spaces and non-metrizable spaces. Even in non-metrizable spaces, “CCC but not separable” is also a way to obtain more information about the spaces being investigated.
____________________________________________________________________
The strategy
Here’s the strategy for finding CCC and not separable.
-
The strategy is to narrow the focus to spaces where “CCC and not separable” is likely to exist. Specifically, look for a space or a class of spaces such that each space in the class has the countable chain condition but is not hereditarily separable. If the non-separable subspace is also a dense subspace of the starting space, it would be “CCC and not separable.”
Any dense subspace of a CCC space always has the CCC. Thus the search focuses on the subspaces in a CCC space that are reliably CCC. The strategy is to find non-separable spaces among these dense subspaces. The search is given an assist if the space or class of spaces in question has a characteristic that delineate the “separable” from the CCC (see Example 3 and Example 4 below).
In the following sections, we illustrate four different ways to apply the strategy.
____________________________________________________________________
Example 1
The first way is a standard example found in the literature. The space to start from is the product space of separable spaces, which is always CCC. By a theorem of Ross and Stone, the product of more than continuum many separable spaces is not separable. Thus one way to get an example of CCC but not separable space is to take the product of more than continuum many separable spaces. For example, if 



____________________________________________________________________
Example 2
The second implementation of the strategy is also from taking the product of separable spaces. This time the number of factors does not have to be more than continuum. Here, we focus on one particular dense subspace of the product space, the 


The subspace 
To implement this example, find any space
____________________________________________________________________
Example 3
The third class of spaces is the class of Pixley-Roy spaces, which are hyperspaces. Given a space ![\mathcal{F}[X]](https://s0.wp.com/latex.php?latex=%5Cmathcal%7BF%7D%5BX%5D&bg=ffffff&fg=333333&s=0&c=20201002)
![F \in \mathcal{F}[X]](https://s0.wp.com/latex.php?latex=F+%5Cin+%5Cmathcal%7BF%7D%5BX%5D&bg=ffffff&fg=333333&s=0&c=20201002)
![[F,U]=\left\{B \in \mathcal{F}[X]: F \subset B \subset U \right\}](https://s0.wp.com/latex.php?latex=%5BF%2CU%5D%3D%5Cleft%5C%7BB+%5Cin+%5Cmathcal%7BF%7D%5BX%5D%3A+F+%5Csubset+B+%5Csubset+U+%5Cright%5C%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![[F,U]](https://s0.wp.com/latex.php?latex=%5BF%2CU%5D&bg=ffffff&fg=333333&s=0&c=20201002)
The Pixley-Roy hyperspaces are discussed in this previous post. Whenever the ground space
![\mathcal{F}[\mathbb{R}]](https://s0.wp.com/latex.php?latex=%5Cmathcal%7BF%7D%5B%5Cmathbb%7BR%7D%5D&bg=ffffff&fg=333333&s=0&c=20201002)
Spaces with countable networks are discussed in this previous post. An example of a space
____________________________________________________________________
Example 4
For the fourth implementation of the strategy, we go back to the product space of separable spaces in Example 2, with the exception that the focus is on the product of the real line 

We know precisely when
Theorem 1 – Theorem I.1.3 [1]
The function space
Based on the theorem,
- Any compact space
- The space
, the first uncountable ordinal with the order topology.
- Any space
where
is not separable.
The function space 

It can be shown that 
Theorem 2 – Theorem I.1.4 [1]
The function space 
Thus picking a non-separable space 
Interestingly, Theorem 1 and Theorem 2 show a duality existing between the property of having a weaker separable metric topology and the property of being separable. The two theorems allow us to switch the two properties between the domain space and the function space.
____________________________________________________________________
Remarks
Another interesting point to make is that Theorem 1 and Theorem 2 together allow us to “buy one get one free.” Once we obtain a space 
The strategy discussed above unifies all four examples. Undoubtedly there will be other examples that can come from the strategy. To find more examples, find a space or a class of spaces that are reliably CCC and then look for potential non-separable spaces among the dense subspaces of the starting space.
____________________________________________________________________
Exercises
- Show that in metrizable spaces, CCC and separable are equivalent. The only part that needs to be shown is that if
- Show that any dense subspace of a CCC space is also CCC.
- Verify that the space
- Verify that the Pixley-Roy space
- Verify that function space
____________________________________________________________________
Reference
- Arkhangelskii, A. V., Topological Function Spaces, Mathematics and Its Applications Series, Kluwer Academic Publishers, Dordrecht, 1992.
- Steen, L. A., Seebach, J. A., Counterexamples in Topology, Dover Publications, Inc., New York, 1995.
____________________________________________________________________
Revised October 26, 2018

Cp(X) where X is a separable metric space
Let 



For definitions of basic open sets and other background information on the function space
____________________________________________________________________
In the remainder of the post,
- normal,
- Lindelof (hence paracompact and collectionwise normal),
- hereditarily Lindelof (hence hereditarily normal),
- hereditarily separable,
- perfectly normal.
All such properties stem from the fact that
Let 






To define a countable network for 

![[B,(a,b)]=\left\{f \in C(X): f(B) \subset (a,b) \right\}](https://s0.wp.com/latex.php?latex=%5BB%2C%28a%2Cb%29%5D%3D%5Cleft%5C%7Bf+%5Cin+C%28X%29%3A+f%28B%29+%5Csubset+%28a%2Cb%29+%5Cright%5C%7D&bg=ffffff&fg=333333&s=0&c=20201002)
There are only countably many sets of the form ![[B,(a,b)]](https://s0.wp.com/latex.php?latex=%5BB%2C%28a%2Cb%29%5D&bg=ffffff&fg=333333&s=0&c=20201002)

![O=\bigcap_{x \in F} [x,O_x]](https://s0.wp.com/latex.php?latex=O%3D%5Cbigcap_%7Bx+%5Cin+F%7D+%5Bx%2CO_x%5D&bg=ffffff&fg=333333&s=0&c=20201002)






![f \in \bigcap_{x \in F} \ [B_x,O_x]](https://s0.wp.com/latex.php?latex=f+%5Cin+%5Cbigcap_%7Bx+%5Cin+F%7D+%5C+%5BB_x%2CO_x%5D&bg=ffffff&fg=333333&s=0&c=20201002)
![\bigcap_{x \in F} \ [B_x,O_x] \subset O](https://s0.wp.com/latex.php?latex=%5Cbigcap_%7Bx+%5Cin+F%7D+%5C+%5BB_x%2CO_x%5D+%5Csubset+O&bg=ffffff&fg=333333&s=0&c=20201002)
Examples include ![C_p([0,1])](https://s0.wp.com/latex.php?latex=C_p%28%5B0%2C1%5D%29&bg=ffffff&fg=333333&s=0&c=20201002)




A space 


____________________________________________________________________

Working with the function space Cp(X)
This post provides basic information about the space of real-valued continuous functions with the pointwise convergence topology. The goal is to discuss the setting and to define the standard basic open sets in the function space, providing background information for subsequent posts.
____________________________________________________________________
Completely Regular Spaces
The starting point is a completely regular space. A space 


![f:X \rightarrow [0,1]](https://s0.wp.com/latex.php?latex=f%3AX+%5Crightarrow+%5B0%2C1%5D&bg=ffffff&fg=333333&s=0&c=20201002)



____________________________________________________________________
Defining the Function Space
Let 
Now we need a good handle on the open sets in the function space 




where each

Thus when working with open sets in 

To make the basic open sets of
![\bigcap_{x \in F} \ [x, O_x] \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ (2)](https://s0.wp.com/latex.php?latex=%5Cbigcap_%7Bx+%5Cin+F%7D+%5C+%5Bx%2C+O_x%5D+%5C+%5C+%5C+%5C+%5C+%5C+%5C+%5C+%5C+%5C+%5C+%5C+%5C+%5C+%5C+%5C+%5C+%5C+%5C+%5C+%5C+%5C+%5C+%5C+%5C+%5C+%5C+%5C+%5C+%5C+%5C+%5C+%5C+%5C+%5C+%5C+%5C+%5C+%282%29&bg=ffffff&fg=333333&s=0&c=20201002)
where ![[x,O_x]](https://s0.wp.com/latex.php?latex=%5Bx%2CO_x%5D&bg=ffffff&fg=333333&s=0&c=20201002)

There is another description of basic open sets that is useful. Let 



In proving results about 
____________________________________________________________________
Basic Discussion
The theory of
In addition to the pointwise convergence topology, there are other topologies that can be defined on
The space
It is well known that 
The properties of
____________________________________________________________________
Reference
- Arkhangelskii, A. V., Topological Function Spaces, Mathematics and Its Applications Series, Kluwer Academic Publishers, Dordrecht, 1992.
____________________________________________________________________
A factorization theorem for products of separable spaces
Let 



Let’s set some notation about the product space we work with in this post. Let 









____________________________________________________________________
Factoring a Continuous Map
The function 




We have the following lemmas.
Lemma 1
-
Let
- There exists a countable
- There exists a countable
where
is continuous.
be a product space. Let be a topological space. Let be continuous. Then the following are equivalent.
Lemma 1a
-
Let
- There exists a countable
- There exists a countable
is continuous.
be a product space. Let be a topological space. Let be a dense subspace of . Let  be continuous. Then the following are equivalent.
be continuous. Then the following are equivalent.
It is straightforward to verify Lemma 1 and Lemma 1a. We use condition 1 to define what it means for a function to be dependent on countably many coordinates. Both lemmas indicate that either condition is a valid definition. These two lemmas also indicate why the notion being discussed can be called a factorization notion.
____________________________________________________________________
When a Continuous Map Can Be Factored
We discuss some conditions that we can place on the product space
Theorem 1
-
Let
be a product space such that each factor is a separable space. Let be a second countable space (i.e. having a countable base). Then for any dense subspace of , any continuous function depends on countably many coordinates, i.e., either one of the conditions in Lemma 1a holds.
Before stating the main theorem, we need one more lemma. Let 



When we try to determine whether a function 



Lemma 2
-
Let
- Let
depends on countably many coordinates.
- Let
depends on countably many coordinates (closure in
be a product space with the countable chain condition. Let be a dense subspace of .
Proof of Lemma 2
Proof of Part 1
Let 


Let 

Claim 1
The open set 
Let 




Claim 2
The set 
Let 
















As noted above,
Proof of Part 2
For any 










Let 







Proof of Theorem 1
Let 




We claim that 

for each

This is possible since 








____________________________________________________________________
Another Version
We state another version of Theorem 1 that will be useful in some situations.
Theorem 2
-
Let
- There exists a countable set
such that for any
, if
and
for all
, then
.
- There exists a countable set
such that
.
be a product space such that each factor is a separable space. Let be a second countable space. Let be a dense subspace of . Let  be any continuous function. Then the function depends on countably many coordinates, which means either one of the following two conditions:
be any continuous function. Then the function depends on countably many coordinates, which means either one of the following two conditions:
The map 




Theorem 2 follows from Theorem 1. It is only a matter of fitting Theorem 2 in the framework of Theorem 1. Note that the product 






With the identification of 

Let 





Choose a countable set 


____________________________________________________________________
Remarks
The notion of factorizing a continuous map defined on a product space is an old topic. Theorem 1 discussed in this post is based on Theorem 4 found in [6]. Theorem 4 found in [6] is to factor continuous maps defined on a product of separable spaces. Theorem 1 in this post is modified to consider continuous maps defined on a dense subspace of a product of separable spaces. This modification will make it more useful. The references listed below represent a small sample of papers or books that have involves theorems of factoring functions defined on products. The work in [3] and [5] have more systematic treatment.
____________________________________________________________________
Reference
- Brandenburg H., Husek M., On mappings from products into developable spaces, Topology Appl., 26, 229-238, 1987.
- Engelking R., General Topology, Revised and Completed edition, Heldermann Verlag, Berlin, 1989.
- Engelking R., On functions defined on Cartesian products, Fund. Math., 59, 221-231, 1966.
- Keesling J., Normality and infinite product spaces, Adv. in. Math., 9, 90-92, 1972.
- Noble N., Ulmer M., Factoring functions on Cartesian products, Trans. Amer. Math. Soc., 163, 329-339, 1972.
- Ross K. A., Stone A. H., Products of separable spaces, Amer. Math. Monthly, 71, 398-403, 1964.
____________________________________________________________________
A lemma dealing with normality in products of separable metric spaces
In this post we prove a lemma that is a great tool for working with product spaces of separable metrizable spaces. As an application of the lemma, we give an alternative proof for showing the non-normality of the product space of uncountably many copies of the discrete space of the non-negative integers.
Consider the product space
Before stating the lemmas, let’s fix some notations. For any
Given a space 


Lemma 1
-
Let
- There exist disjoint open subsets
and
.
- There exists a countable
and
are separated in the space
.
be a product of separable metrizable spaces. Let be a dense subspace of . For any sets  , the following two conditions are equivalent:
, the following two conditions are equivalent:
Lemma 2
-
Let
be a product of separable metrizable spaces. Let be a dense subspace of . Then is normal if and only if for each pair of disjoint closed subsets  and
and  of , there exists a countable such that and are separated in .
of , there exists a countable such that and are separated in .
If Lemma 1 holds, it is clear that Lemma 2 holds. We prove Lemma 1. The lemmas indicate that to separate disjoint sets in the full product, it suffices to separate in a countable subproduct. In this sense normality in dense subspaces of a product of separable metrizable spaces only depends on countably many coordinates.
This lemma seems to have been around for a long time. We cannot find any reference of this lemma in Engelking’s topology textbook (see [4]). We found three references. One is Corson’s paper (see [3]), in which the lemma is mentioned in relation to the non-normality of 


____________________________________________________________________
Proof of Lemma 1
Let 



Let 


Let 


 and
and 
The above observations lead to the following observations:

implying that 



We claim that 












We have 




Suppose that 



Consider 
For 











____________________________________________________________________
Remark
The proof of Lemma 1 does not need the full strength of separable metric in each factor of the product space. The above proof only makes two assumptions about the product space: the product space
____________________________________________________________________
Example
As an application of the above lemma, we give another proof of the non-normality of the product space of uncountably many copies of the discrete space of the non-negative integers. See this post for a version of A. H. Stone’s original proof.
Let 



We can also use Lemma 1 to show that 

To see that 





____________________________________________________________________
Reference
- Arkhangelskii, A. V., Topological Function Spaces, Mathematics and Its Applications Series, Kluwer Academic Publishers, Dordrecht, 1992.
- Baturov, D. P., Normality in dense subspaces of products, Topology Appl., 36, 111-116, 1990.
- Corson, H. H., Normality in subsets of product spaces, Amer. J. Math., 81, 785-796, 1959.
- Engelking, R., General Topology, Revised and Completed edition, Heldermann Verlag, Berlin, 1989.
____________________________________________________________________
Looking for a closed and discrete subspace of a product space
I had long suspected that there probably is an uncountable closed and discrete subset of the product space of uncountably many copies of the real line. Then I found the statement in the Encyclopedia of General Topology (page 76 in [3]) that “for every infinite cardinal 






The Encyclopedia of General Topology points to two references [2] and [4]. I could not find these papers online. It turns out that Engelking, the author of [2], included this fact as an exercise in his general topology textbook (see Exercise 3.1.H (a) in [1]). This post presents a proof of this fact based on the hints that are given in [1]. To make the argument easier to follow, the proof uses some of the hints in a slightly different form.
____________________________________________________________________
The Exercise
Let ![I=[0,1]](https://s0.wp.com/latex.php?latex=I%3D%5B0%2C1%5D&bg=ffffff&fg=333333&s=0&c=20201002)





____________________________________________________________________
A Solution
For each 


for each
,
for each
.
For any 






![(a,1]](https://s0.wp.com/latex.php?latex=%28a%2C1%5D&bg=ffffff&fg=333333&s=0&c=20201002)
The above sequences of open intervals help define a homeomorphic embedding of the discrete space 
for each 

for each 



The mapping 
- If each
is continuous, then
- If the family of functions
separates points in
- If
is also continuous.
The first point is easily seen. Note that both the domain and the range of 




Since 




Let 





Case 1
Suppose that 



Let 

The last description above indicates that if 





Case 2
Suppose that 




Note that 




We have shown that the image of the discrete space 
____________________________________________________________________
Comments
The preceding proof shows that the product space of continuum many copies of
One immediate consequence is that the product space 
____________________________________________________________________
Reference
- Engelking, R., General Topology, Revised and Completed edition, Heldermann Verlag, Berlin, 1989.
- Engelking, R., On the double circumference of Alexandroff, Bull. Acad. Polon. Sci., 16, 629-634, 1968.
- Hart, K. P., Nagata J. I., Vaughan, J. E., editors, Encyclopedia of General Topology, First Edition, Elsevier Science Publishers B. V, Amsterdam, 2003.
- Juhasz, I., On closed discrete subspace of product spaces, Bull. Acad. Polon. Sci., 17, 219-223, 1969.
____________________________________________________________________
A theorem about CCC spaces
It is a well known result in general topology that in any regular space with the countable chain condition, paracompactness and the Lindelof property are equivalent. The proof of this result hinges on one theorem about the spaces with the countable chain condition. In this post we are to put the spotlight on this theorem (Theorem 1 below) and then use it to prove a few results. These results indicate that in a space with the countable chain condition with some weaker covering property is either Lindelof or paracompact.
This post is centered on a theorem about the CCC property (Theorem 1 and Theorem 1a below). So it can be considered as a continuation of a previous post on CCC called Some basic properties of spaces with countable chain condition. The results that are derived from Theorem 1 are also found in [2]. But the theorem concerning CCC is only a small part of that paper among several other focuses. In this post, the exposition is to explain several interesting theorems that are derived from Theorem 1. One of the theorems is the statement that every locally compact metacompact perfectly normal space is paracompact, a theorem originally proved by Arhangelskii (see Theorem 11 below).
____________________________________________________________________
CCC Spaces
All spaces under consideration are at least
____________________________________________________________________
A Theorem about CCC Spaces
The theorem of CCC spaces we want to discuss has to do with collections of open sets that are “nice”. We first define what we mean by nice. Let 
Now we define what we mean by “nice” collection of open sets. The collection 
The property of being a separable space implies the CCC. The reverse is not true. However the CCC property is still a very strong property. The CCC property is equivalent to the property that if a collection of non-empty open sets is “nice” on a dense set of points, then the collection of open sets is a countable collection. The following is a precise statement.
-
Theorem 1
-
Let
be a CCC space. Then if is a collection of non-empty open subsets of such that the following set

is dense in the open subspace 
The collections of open sets in the above theorem do not have to be open covers. However, if they are open covers, the theorem can tie CCC spaces with some covering properties. As long as the space has the CCC, any open cover that is locally-countable on a dense set must be countable. Looking at it in the contrapositive angle, in a CCC space, any uncountable open cover is not locally-countable in some open set.
Proof of Theorem 1
Let 
For each 





For 

such that 








One observation we make is that for 



Note that each 

Because the space
Furthermore, each 
The property in Theorem 1 is actually equivalent to the CCC property. Just that the proof of Theorem 1 represents the hard direction that needs to be proved. Theorem 1 can be expanded to be the following theorem.
-
Theorem 1a
- The space
- If
is dense in the open subspace
- If
-
Let
be a space. Then the following conditions are equivalent.
The direction 


____________________________________________________________________
Tying Theorem 1 to “Nice” Open Covers
One easy application of Theorem 1 is to tie it to locally-finite and locally-countable open covers. We have the following theorem.
-
Theorem 2
-
In any CCC space, any locally-countable open cover must be countable. Thus any locally-finite open cover must also be countable.
Theorem 2 gives the well known result that any CCC paracompact space is Lindelof (see Theorem 5 below). In fact, Theorem 2 gives the result that any CCC para-Lindelof space is Lindelof (see Theorem 6 below). A space
Can Theorem 2 hold for point-finite covers (or point-countable covers)? The answer is no (see Example 1 below). With the additional property of having a Baire space, we have the following theorem.
-
Theorem 3
-
In any Baire space with the CCC, any point-finite open cover must be countable.
A Space 

.
Proof of Theorem 3
Let
By Theorem 1, there exists an open set 


Note that 



Choose 





Every point in 



Suppose that 

Suppose that 


Each element of
Both cases
As a corollary to Theorem 3, we have the result that every Baire CCC metacompact space is Lindelof.
____________________________________________________________________
Some Applications of Theorems 2 and 3
In proving paracompactness in some of the theorems, we need a theorem involving the concept of star-countable open cover. A collection 

is finite (countable). The proof of the following theorem can be found in Engleking (see the direction (iv) implies (i) in the proof of Theorem 5.3.10 on page 326 in [1]).
-
Theorem 4
-
If every open cover of a regular space
has a star-countable open refinement, then is paracompact.
As indicated in the above section, Theorem 2 and Theorem 3 have some obvious applications. We have the following theorems.
-
Theorem 5
-
Let
be a CCC space. Then is paracompact if and only of is Lindelof.
Proof of Theorem 5
The direction 
The direction 
-
Theorem 6
-
Every CCC para-Lindelof space is Lindelof.
Proof of Theorem 6
This also follows from Theorem 2.
-
Theorem 7
-
Every Baire CCC metacompact space is Lindelof.
Proof of Theorem 7
Let
-
Theorem 8
-
Every Baire CCC hereditarily metacompact space is hereditarily Lindelof.
Proof of Theorem 8
Let
-
Theorem 9
-
Every locally CCC regular para-Lindelof space is paracompact.
Proof of Theorem 9
A space is locally CCC if every point has an open neighborhood that has the CCC. Let
Now we show that 


which is is open cover of
-
Theorem 10
-
Every locally CCC regular metacompact Baire space is paracompact.
Proof of Theorem 10
Let
Now we show that
which is is open cover of
-
Theorem 11
-
Every locally compact metacompact perfectly normal space is paracompact.
Proof of Theorem 11
This follows from Theorem 10 after we prove the following two points:
- Any locally compact space is a Baire space.
- Any perfect locally compact space is locally CCC.
To see the first point, let 












To see the second point, let 





Let 








The set 





____________________________________________________________________
Some Examples
Example 1
A CCC space

i.e, the product space of 

The product space 

Then 
The following three examples center around the four properties in Theorem 7 (Baire + CCC + metacompact imply Lindelof). These examples show that each property in the hypothesis is crucial.
Example 2
A separable non-Lindelof space that is a Baire space. This example shows that the metacompact assumption is crucial for Theorem 7.
The example is the Sorgenfrey plane 
Example 3
A non-Lindelof metacompact Baire space
This space
Example 4
A non-Lindelof CCC metacompact non-Baire space
Let
____________________________________________________________________
Reference
- Engelking, R., General Topology, Revised and Completed edition, Heldermann Verlag, Berlin, 1989.
- Tall, F. D., The Countable Chain Condition Versus Separability – Applications of Martin’s Axiom, Gen. Top. Appl., 4, 315-339, 1974.
____________________________________________________________________
Pixley-Roy hyperspaces
In this post, we introduce a class of hyperspaces called Pixley-Roy spaces. This is a well-known and well studied set of topological spaces. Our goal here is not to be comprehensive but rather to present some selected basic results to give a sense of what Pixley-Roy spaces are like.
A hyperspace refers to a space in which the points are subsets of a given “ground” space. There are more than one way to define a hyperspace. Pixley-Roy spaces were first described by Carl Pixley and Prabir Roy in 1969 (see [5]). In such a space, the points are the non-empty finite subsets of a given ground space. More precisely, let 
The sets
The hyperspace as defined above was first defined by Pixley and Roy on the real line (see [5]) and was later generalized by van Douwen (see [7]). These spaces are easy to define and is useful for constructing various kinds of counterexamples. Pixley-Roy played an important part in answering the normal Moore space conjecture. Pixley-Roy spaces have also been studied in their own right. Over the years, many authors have investigated when the Pixley-Roy spaces are metrizable, normal, collectionwise Hausdorff, CCC and homogeneous. For a small sample of such investigations, see the references listed at the end of the post. Our goal here is not to discuss the results in these references. Instead, we discuss some basic properties of Pixley-Roy to solidify the definition as well as to give a sense of what these spaces are like. Good survey articles of Pixley-Roy are [3] and [7].
____________________________________________________________________
Basic Discussion
In this section, we focus on properties that are always possessed by a Pixley-Roy space given that the ground space is at least
- The topology defined above is a legitimate one, i.e., the sets
Let ![\mathcal{B}=\left\{[F,U]: F \in \mathcal{F}[X] \text{ and } U \text{ is open in } X \right\}](https://s0.wp.com/latex.php?latex=%5Cmathcal%7BB%7D%3D%5Cleft%5C%7B%5BF%2CU%5D%3A+F+%5Cin+%5Cmathcal%7BF%7D%5BX%5D+%5Ctext%7B+and+%7D+U+%5Ctext%7B+is+open+in+%7D+X+%5Cright%5C%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![[F,X]](https://s0.wp.com/latex.php?latex=%5BF%2CX%5D&bg=ffffff&fg=333333&s=0&c=20201002)
![A \in [F_1,U_1] \cap [F_2,U_2]](https://s0.wp.com/latex.php?latex=A+%5Cin+%5BF_1%2CU_1%5D+%5Ccap+%5BF_2%2CU_2%5D&bg=ffffff&fg=333333&s=0&c=20201002)
![A \in [A,U_1 \cap U_2] \subset [F_1,U_1] \cap [F_2,U_2]](https://s0.wp.com/latex.php?latex=A+%5Cin+%5BA%2CU_1+%5Ccap+U_2%5D+%5Csubset+++%5BF_1%2CU_1%5D+%5Ccap+%5BF_2%2CU_2%5D&bg=ffffff&fg=333333&s=0&c=20201002)
To show 




![[A,U \cup V]](https://s0.wp.com/latex.php?latex=%5BA%2CU+%5Ccup+V%5D&bg=ffffff&fg=333333&s=0&c=20201002)
![[B,V]](https://s0.wp.com/latex.php?latex=%5BB%2CV%5D&bg=ffffff&fg=333333&s=0&c=20201002)
To see that ![C \notin [F,U]](https://s0.wp.com/latex.php?latex=C+%5Cnotin+%5BF%2CU%5D&bg=ffffff&fg=333333&s=0&c=20201002)



![[C,V] \cap [F,U]=\varnothing](https://s0.wp.com/latex.php?latex=%5BC%2CV%5D+%5Ccap+%5BF%2CU%5D%3D%5Cvarnothing&bg=ffffff&fg=333333&s=0&c=20201002)
The fact that
To show that 

![V_F=[F,X] \cap G_F](https://s0.wp.com/latex.php?latex=V_F%3D%5BF%2CX%5D+%5Ccap+G_F&bg=ffffff&fg=333333&s=0&c=20201002)
![\mathcal{V}=\left\{V_F: F \in \mathcal{F}[X] \right\}](https://s0.wp.com/latex.php?latex=%5Cmathcal%7BV%7D%3D%5Cleft%5C%7BV_F%3A+F+%5Cin+%5Cmathcal%7BF%7D%5BX%5D+%5Cright%5C%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![A \in \mathcal{F}[X]](https://s0.wp.com/latex.php?latex=A+%5Cin+%5Cmathcal%7BF%7D%5BX%5D&bg=ffffff&fg=333333&s=0&c=20201002)


A similar argument show that ![Y \subset \mathcal{F}[X]](https://s0.wp.com/latex.php?latex=Y+%5Csubset+%5Cmathcal%7BF%7D%5BX%5D&bg=ffffff&fg=333333&s=0&c=20201002)




![W_F=([F,X] \cap Y) \cap H_F](https://s0.wp.com/latex.php?latex=W_F%3D%28%5BF%2CX%5D+%5Ccap+Y%29+%5Ccap+H_F&bg=ffffff&fg=333333&s=0&c=20201002)



____________________________________________________________________
More Basic Results
We now discuss various basic topological properties of
- If
- If
- If
- If
- If
- If
- If
- If
- If
- The Pixley-Roy space of the Sorgenfrey line does not have the CCC.
- If
Bullet points 6 to 9 refer to properties that are never possessed by Pixley-Roy spaces except in trivial cases. Bullet points 6 to 8 indicate that
__________________________________
To see bullet point 6, let 


![[\left\{x \right\} ,X]](https://s0.wp.com/latex.php?latex=%5B%5Cleft%5C%7Bx+%5Cright%5C%7D+%2CX%5D&bg=ffffff&fg=333333&s=0&c=20201002)
__________________________________
To see bullet point 7, let 

![[A ,X] \cap Y](https://s0.wp.com/latex.php?latex=%5BA+%2CX%5D+%5Ccap+Y&bg=ffffff&fg=333333&s=0&c=20201002)
__________________________________
To see bullet point 8, note that ![\left\{[F_1,U_1],[F_2,U_2],[F_3,U_3],\cdots \right\}](https://s0.wp.com/latex.php?latex=%5Cleft%5C%7B%5BF_1%2CU_1%5D%2C%5BF_2%2CU_2%5D%2C%5BF_3%2CU_3%5D%2C%5Ccdots+%5Cright%5C%7D&bg=ffffff&fg=333333&s=0&c=20201002)

![[F_n,U_n]](https://s0.wp.com/latex.php?latex=%5BF_n%2CU_n%5D&bg=ffffff&fg=333333&s=0&c=20201002)
__________________________________
For an elementary discussion on Baire spaces, see this previous post.
To see bullet point 9, let ![V=[\left\{ x \right\},X]](https://s0.wp.com/latex.php?latex=V%3D%5B%5Cleft%5C%7B+x+%5Cright%5C%7D%2CX%5D&bg=ffffff&fg=333333&s=0&c=20201002)

![H_n=\left\{F \in \mathcal{F}[X]: x \in F \text{ and } \lvert F \lvert \le n \right\}](https://s0.wp.com/latex.php?latex=H_n%3D%5Cleft%5C%7BF+%5Cin+%5Cmathcal%7BF%7D%5BX%5D%3A+x+%5Cin+F+%5Ctext%7B+and+%7D+%5Clvert+F+%5Clvert+%5Cle+n+%5Cright%5C%7D&bg=ffffff&fg=333333&s=0&c=20201002)
We show that each 

![[A,X]](https://s0.wp.com/latex.php?latex=%5BA%2CX%5D&bg=ffffff&fg=333333&s=0&c=20201002)
![[B,U]](https://s0.wp.com/latex.php?latex=%5BB%2CU%5D&bg=ffffff&fg=333333&s=0&c=20201002)
![[B,U] \subset V](https://s0.wp.com/latex.php?latex=%5BB%2CU%5D+%5Csubset+V&bg=ffffff&fg=333333&s=0&c=20201002)



![[C,U]](https://s0.wp.com/latex.php?latex=%5BC%2CU%5D&bg=ffffff&fg=333333&s=0&c=20201002)
![[C,U] \subset [B,U]](https://s0.wp.com/latex.php?latex=%5BC%2CU%5D+%5Csubset+%5BB%2CU%5D&bg=ffffff&fg=333333&s=0&c=20201002)
__________________________________
To see bullet point 10, let 


![\left\{[\left\{ x_O \right\},O]: O \in \mathcal{O} \right\}](https://s0.wp.com/latex.php?latex=%5Cleft%5C%7B%5B%5Cleft%5C%7B+x_O+%5Cright%5C%7D%2CO%5D%3A+O+%5Cin+%5Cmathcal%7BO%7D+%5Cright%5C%7D&bg=ffffff&fg=333333&s=0&c=20201002)
__________________________________
To see bullet point 11, let 


![\left\{[\left\{y \right\},O_y]: y \in Y \right\}](https://s0.wp.com/latex.php?latex=%5Cleft%5C%7B%5B%5Cleft%5C%7By+%5Cright%5C%7D%2CO_y%5D%3A+y+%5Cin+Y+%5Cright%5C%7D&bg=ffffff&fg=333333&s=0&c=20201002)
__________________________________
To see bullet point 12, let 


such that 






Then ![\left\{[\left\{x_\alpha \right\},U_\alpha]: \alpha < \omega_1 \right\}](https://s0.wp.com/latex.php?latex=%5Cleft%5C%7B%5B%5Cleft%5C%7Bx_%5Calpha+%5Cright%5C%7D%2CU_%5Calpha%5D%3A+%5Calpha+%3C+%5Comega_1+%5Cright%5C%7D&bg=ffffff&fg=333333&s=0&c=20201002)
__________________________________
To see bullet point 13, let ![[A,U]](https://s0.wp.com/latex.php?latex=%5BA%2CU%5D&bg=ffffff&fg=333333&s=0&c=20201002)

![D=\bigcup \left\{A: [A,U] \in \mathcal{G} \text{ for some open } U \right\}](https://s0.wp.com/latex.php?latex=D%3D%5Cbigcup+%5Cleft%5C%7BA%3A+%5BA%2CU%5D+%5Cin+%5Cmathcal%7BG%7D+%5Ctext%7B+for+some+open+%7D+U++%5Cright%5C%7D&bg=ffffff&fg=333333&s=0&c=20201002)
We claim that the set 



![[\left\{y \right\},W] \cap [A,U]=\varnothing](https://s0.wp.com/latex.php?latex=%5B%5Cleft%5C%7By+%5Cright%5C%7D%2CW%5D+%5Ccap+%5BA%2CU%5D%3D%5Cvarnothing&bg=ffffff&fg=333333&s=0&c=20201002)
![[A,U] \in \mathcal{G}](https://s0.wp.com/latex.php?latex=%5BA%2CU%5D+%5Cin+%5Cmathcal%7BG%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![[\left\{y \right\},W]](https://s0.wp.com/latex.php?latex=%5B%5Cleft%5C%7By+%5Cright%5C%7D%2CW%5D&bg=ffffff&fg=333333&s=0&c=20201002)
If
__________________________________
A collection 
To see bullet point 14, let ![\left\{[A_\alpha,U_\alpha]: \alpha < \omega_1 \right\}](https://s0.wp.com/latex.php?latex=%5Cleft%5C%7B%5BA_%5Calpha%2CU_%5Calpha%5D%3A+%5Calpha+%3C+%5Comega_1+%5Cright%5C%7D&bg=ffffff&fg=333333&s=0&c=20201002)





![\bigcap \limits_{\alpha \in E} [A_\alpha,U_\alpha] \ne \varnothing](https://s0.wp.com/latex.php?latex=%5Cbigcap+%5Climits_%7B%5Calpha+%5Cin+E%7D+%5BA_%5Calpha%2CU_%5Calpha%5D+%5Cne+%5Cvarnothing&bg=ffffff&fg=333333&s=0&c=20201002)
Thus if the ground space
__________________________________
The implications in bullet points 12 and 13 cannot be reversed. Hereditarily Lindelof property and hereditarily separability are not sufficient conditions for
To see bullet point 15, let 

![\left\{[ \left\{ x \right\},U_x]: x \in S \right\}](https://s0.wp.com/latex.php?latex=%5Cleft%5C%7B%5B+%5Cleft%5C%7B+x+%5Cright%5C%7D%2CU_x%5D%3A+x+%5Cin+S+%5Cright%5C%7D&bg=ffffff&fg=333333&s=0&c=20201002)
![\mathcal{F}[S]](https://s0.wp.com/latex.php?latex=%5Cmathcal%7BF%7D%5BS%5D&bg=ffffff&fg=333333&s=0&c=20201002)
__________________________________
A Moore space is a space with a development. For the definition, see this previous post.
To see bullet point 16, for each 
For each finite 


![\mathcal{H}_n=\left\{[F,B_n(F)]: F \in \mathcal{F}[X] \right\}](https://s0.wp.com/latex.php?latex=%5Cmathcal%7BH%7D_n%3D%5Cleft%5C%7B%5BF%2CB_n%28F%29%5D%3A+F+%5Cin+%5Cmathcal%7BF%7D%5BX%5D+%5Cright%5C%7D&bg=ffffff&fg=333333&s=0&c=20201002)
We claim that 

![[F,B_n(F)] \subset V](https://s0.wp.com/latex.php?latex=%5BF%2CB_n%28F%29%5D+%5Csubset+V&bg=ffffff&fg=333333&s=0&c=20201002)
For each non-empty proper 

![[F,B_{f(G)}(F)] \subset V](https://s0.wp.com/latex.php?latex=%5BF%2CB_%7Bf%28G%29%7D%28F%29%5D+%5Csubset+V&bg=ffffff&fg=333333&s=0&c=20201002)


We have 
![F \notin [G,B_m(G)]](https://s0.wp.com/latex.php?latex=F+%5Cnotin+%5BG%2CB_m%28G%29%5D&bg=ffffff&fg=333333&s=0&c=20201002)

![[F,B_m(F)]](https://s0.wp.com/latex.php?latex=%5BF%2CB_m%28F%29%5D&bg=ffffff&fg=333333&s=0&c=20201002)
![[G,B_m(G)]](https://s0.wp.com/latex.php?latex=%5BG%2CB_m%28G%29%5D&bg=ffffff&fg=333333&s=0&c=20201002)
![[F,B_m(F)] \subset V](https://s0.wp.com/latex.php?latex=%5BF%2CB_m%28F%29%5D+%5Csubset+V&bg=ffffff&fg=333333&s=0&c=20201002)
We have shown that for each open
____________________________________________________________________
Examples
In the original construction of Pixley and Roy, the example was 


![\mathcal{F}[M]](https://s0.wp.com/latex.php?latex=%5Cmathcal%7BF%7D%5BM%5D&bg=ffffff&fg=333333&s=0&c=20201002)
On the other hand, Pixley-Roy space of the Sorgenfrey line and the Pixley-Roy space of
The Sorgenfrey line and the first uncountable ordinal are classic examples of topological spaces that demonstrate that topological spaces in general are not as well behaved like metrizable spaces. Yet their Pixley-Roy spaces are nice. The real line and other separable metric spaces are nice spaces that behave well. Yet their Pixley-Roy spaces are very much unlike the ground spaces. This inverse relation between the ground space and the Pixley-Roy space was noted by van Douwen (see [3] and [7]) and is one reason that Pixley-Roy hyperspaces are a good source of counterexamples.
____________________________________________________________________
Reference
- Bennett, H. R., Fleissner, W. G., Lutzer, D. J., Metrizability of certain Pixley-Roy spaces, Fund. Math. 110, 51-61, 1980.
- Daniels, P, Pixley-Roy Spaces Over Subsets of the Reals, Topology Appl. 29, 93-106, 1988.
- Lutzer, D. J., Pixley-Roy topology, Topology Proc. 3, 139-158, 1978.
- Hajnal, A., Juahasz, I., When is a Pixley-Roy Hyperspace CCC?, Topology Appl. 13, 33-41, 1982.
- Pixley, C., Roy, P., Uncompletable Moore spaces, Proc. Auburn Univ. Conf. Auburn, AL, 1969.
- Przymusinski, T., Normality and paracompactness of Pixley-Roy hyperspaces, Fund. Math. 113, 291-297, 1981.
- van Douwen, E. K., The Pixley-Roy topology on spaces of subsets, Set-theoretic Topology, Academic Press, New York, 111-134, 1977.
- Tall, F. D., Normality versus Collectionwise Normality, Handbook of Set-Theoretic Topology (K. Kunen and J. E. Vaughan, eds), Elsevier Science Publishers B. V., Amsterdam, 685-732, 1984.
- Tanaka, H, Normality and hereditary countable paracompactness of Pixley-Roy hyperspaces, Fund. Math. 126, 201-208, 1986.
____________________________________________________________________
Topological Spaces with Caliber Omega 1
Let
-
For every collection
 of non-empty open subsets of , there is an uncountable
of non-empty open subsets of , there is an uncountable  such that
such that  .
.
Any space that has this property is said to have caliber

The chain condition “caliber 
____________________________________________________________________
Delta System Lemma
In proving that product of separable spaces has caliber 



Lemma 1 – Delta-System Lemma
For every uncountable collection 
The statement of Delta-system lemma presented here is a special case for a general version (see [2], page 49).
____________________________________________________________________
Products of Spaces with Caliber
Theorem 2 below shows that whenever “caliber
Theorem 2
Suppose that 



Proof
In proving the product space 




For each 






Consider the case that the root of the Delta-system is empty. Then for any 









Now assume 




Consider two cases. One is that 








Now assume 

Corollary 3
Suppose that
Proof
This follows directly from Theorem 2. Note that the product of finitely many separable is separable (hence has caliber
____________________________________________________________________
Examples
We now show that the following implications are not reversible.
To get a space with caliber
To get a space with the CCC that does not have caliber 


To see that 




The example
____________________________________________________________________
Reference
- Engelking, R., General Topology, Revised and Completed edition, Heldermann Verlag, Berlin, 1989.
- Kunen, K., Set Theory, An Introduction to Independence Proofs, North-Holland, Amsterdam, 1980.
- Willard, S., General Topology, Addison-Wesley Publishing Company, 1970.
____________________________________________________________________

