Paracompact spaces and Lindelof spaces are familiar notions of covering properties. The covering properties resulting from replacing the para with meta in the case of paracompact and adding meta to Lindelof are also spaces that had been extensively studied. This is an introduction of meta-Lindelof spaces by way of examples.
Definitions
All spaces under discussion are Hausdorff and regular. A space  is paracompact if every open cover of has a locally finite open refinement. A space is metacompact if every open cover of has a point-finite open refinement. A space is Lindelof if every open cover of has a countable subcover, i.e., every open cover of has a countable subcollection that is also a cover of . A space is meta-Lindelof if every open cover of has a point-countable open refinement, i.e., every open cover
is paracompact if every open cover of has a locally finite open refinement. A space is metacompact if every open cover of has a point-finite open refinement. A space is Lindelof if every open cover of has a countable subcover, i.e., every open cover of has a countable subcollection that is also a cover of . A space is meta-Lindelof if every open cover of has a point-countable open refinement, i.e., every open cover  of has a subcollection
of has a subcollection  such that is a refinement of and that is a point-countable collection. From the definitions, we have the implications shown in the following diagram.
such that is a refinement of and that is a point-countable collection. From the definitions, we have the implications shown in the following diagram.
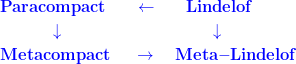
It is well known that any regular Lindelof space is paracompact (the left arrow at the top of the diagram). The two down arrows and the right arrow at the bottom in the diagram follow from the definitions. If there is an up arrow from meta-Lindelof to Lindelof, the diagram would be a closed loop, which would mean all 4 notions are equivalent. At minimum, there are paramcompact spaces that are not Lindelof. For example, any non-separable metric space is paracompact and not Lindelof. Thus, in general it is impossible for the diagram to be a closed loop. In other words, there must be meta-Lindelof spaces that are not Lindelof. However, with additional assumptions, an up arrow from meta-Lindelof to Lindelof is possible. Theorem 1 below shows that the diagram is a closed loop for separable spaces. It is well known that paracompact spaces with the countable chain condition (CCC) are Lindelof (see here). Perhaps an up arrow from meta-Lindelof to Lindelof is possible for spaces with CCC. We discuss some partial results at the end of this article.
Spaces that are not meta-Lindelof
We present two spaces that are not meta-Lindelof (Example 1 and Example 2). The following theorem will make the examples clear.
Theorem 1
Let be a separable space. If is meta-Lindelof, then is Lindelof.
Proof
Let be an open cover of . Since is meta-Lindelof, there is a point-countable open refinement of . Let  be a countable dense subset of . Let
be a countable dense subset of . Let  be defined by
be defined by  . Since is point-countable, each point of can belong to only countably many
. Since is point-countable, each point of can belong to only countably many  . It follows that is countable. Furthermore,
. It follows that is countable. Furthermore,  . The set inclusion
. The set inclusion  is clear. The set inclusion
is clear. The set inclusion  follows from the fact that is a dense subset. To complete the proof, for each
follows from the fact that is a dense subset. To complete the proof, for each  , choose
, choose  such that
such that  . Then
. Then  is a countable subcover of . This completes the proof that is Lindelof.
is a countable subcover of . This completes the proof that is Lindelof. 
In the above proof, the countable dense set forces the point-countable open refinement to be countable, thus leading to a countable subcover of the original open cover. We now look at examples.
Example 1
The idea for this example is that any separable space that is known to be non-Lindelof must not be meta-Lindelof due to the above theorem. A handy example is the Sorgenfrey plane  . Recall that the Sorgenfrey line
. Recall that the Sorgenfrey line  is the real number line topologized by the base consisting of the half open intervals of the form
is the real number line topologized by the base consisting of the half open intervals of the form  . It is well known that is hereditarily Lindelof, separable and not metrizable. The Sorgenfrey line is a classic example of a Lindelof space whose square is not even normal, thus not Lindelof (see here). By Theorem 1, the Sorgenfrey plane is not meta-Lindelof.
. It is well known that is hereditarily Lindelof, separable and not metrizable. The Sorgenfrey line is a classic example of a Lindelof space whose square is not even normal, thus not Lindelof (see here). By Theorem 1, the Sorgenfrey plane is not meta-Lindelof.
Example 2
This is another example that is separable and non-Lindelof, hence not meta-Lindelof. The space is the Mrowka space (or Psi-space), which is defined here. To define the space, let  be uncountable almost disjoint family of subsets of
be uncountable almost disjoint family of subsets of  , that is, for any
, that is, for any  with
with  ,
,  is finite. The underlying set is
is finite. The underlying set is  . The points in are isolated. An open neighborhood of
. The points in are isolated. An open neighborhood of  is of the form
is of the form  where
where  is a finite set. The space is not Lindelof since is an uncountable closed and discrete subset. It is separable since the set of integers, , is a dense subset. By Theorem 1, the space must not be meta-Lindelof. This space is a classic example of a space that has a
is a finite set. The space is not Lindelof since is an uncountable closed and discrete subset. It is separable since the set of integers, , is a dense subset. By Theorem 1, the space must not be meta-Lindelof. This space is a classic example of a space that has a  -diagonal but is not submetrizable.
-diagonal but is not submetrizable.
Example 3
Example 1 is not normal. Example 2 is not normal if the almost disjoint family has cardinality continuum (due to Jones’ Lemma). For Example 2 to be normal, additional set theory axiom is required. Example 3 is a normal example of a space that is not meta-Lindelof.
Consider  , the space of the countable ordinals with the ordered topology. This space is not Lindelof since the open cover consisting of
, the space of the countable ordinals with the ordered topology. This space is not Lindelof since the open cover consisting of ![[0,\alpha]](https://s0.wp.com/latex.php?latex=%5B0%2C%5Calpha%5D&bg=ffffff&fg=333333&s=0&c=20201002) , where
, where  , is an open cover that has no countable subcover. The space is also not paracompact since some open covers cannot be locally finite. The same idea can show that certain open covers cannot be point-countable open cover. This is due to the pressing down lemma (see here). To see this, for each limit ordinal , let
, is an open cover that has no countable subcover. The space is also not paracompact since some open covers cannot be locally finite. The same idea can show that certain open covers cannot be point-countable open cover. This is due to the pressing down lemma (see here). To see this, for each limit ordinal , let ![O_\alpha=(f(\alpha), \alpha]](https://s0.wp.com/latex.php?latex=O_%5Calpha%3D%28f%28%5Calpha%29%2C+%5Calpha%5D&bg=ffffff&fg=333333&s=0&c=20201002) be an open set containing
be an open set containing  . Then the function
. Then the function  is a so called pressing down function. By the pressing down lemma, there exist some
is a so called pressing down function. By the pressing down lemma, there exist some  such that the set
such that the set  is a stationary subset of . This implies that the point would belong to uncountably many open sets
is a stationary subset of . This implies that the point would belong to uncountably many open sets  . Thus, any open cover of containing the sets cannot be point-countable.
. Thus, any open cover of containing the sets cannot be point-countable.
To wrap up the example, let be any open refinement of the open cover consisting of the open sets ![[0, \alpha]](https://s0.wp.com/latex.php?latex=%5B0%2C+%5Calpha%5D&bg=ffffff&fg=333333&s=0&c=20201002) . We choose described above such that each is contained in some
. We choose described above such that each is contained in some  . This means that cannot be point-countable. Thus, one open cover of has no point-countable open refinement, showing that the space of all countable ordinals,
. This means that cannot be point-countable. Thus, one open cover of has no point-countable open refinement, showing that the space of all countable ordinals,  , cannot be meta-Lindelof.
, cannot be meta-Lindelof.
Example 4
This example makes use of Example 3. Consider be the product space of many copies of the real line  . Each
. Each  is a function
is a function  . Let
. Let  denote
denote  for each . Let
for each . Let  be the set of all points
be the set of all points  in where is non-zero for at most countably many . This space is called the
in where is non-zero for at most countably many . This space is called the  -product of lines. The topology of is the inherited product topology from the product space . The -product of separable metric spaces is collectionwise normal (see here). The -product of uncountably many spaces, each of which has at least 2 points, always contains a closed copy of the space (see here).
-product of lines. The topology of is the inherited product topology from the product space . The -product of separable metric spaces is collectionwise normal (see here). The -product of uncountably many spaces, each of which has at least 2 points, always contains a closed copy of the space (see here).
Observe that closed subspaces of a meta-Lindelof space are always meta-Lindelof. Thus the -product defined here cannot be a meta-Lindelof space. This example is revisited in Example 6 below.
Meta-Lindelof but not Lindelof
Example 5
This example is the Michael line  , which is the real line topologized by making the irrational numbers isolated and letting the rational numbers retain the usual Euclidean open sets (a basic introduction is found here). The usual Euclidean open sets of the real line are also open in the Michael line. Thus, is a submetrizable space.
, which is the real line topologized by making the irrational numbers isolated and letting the rational numbers retain the usual Euclidean open sets (a basic introduction is found here). The usual Euclidean open sets of the real line are also open in the Michael line. Thus, is a submetrizable space.
To see that it is meta-Lindelof, let be an open cover of the Michael line . Choose  such that
such that  covers the rational numbers. Let
covers the rational numbers. Let  . Thus is a point-countable open refinement of . This shows that the Michael line is meta-Lindelof. This fact can also be seen from the above diagram, which shows that paracompact
. Thus is a point-countable open refinement of . This shows that the Michael line is meta-Lindelof. This fact can also be seen from the above diagram, which shows that paracompact  metacompact meta-Lindelof. Note that the Michael line is a paracompact space that is not Lindelof.
metacompact meta-Lindelof. Note that the Michael line is a paracompact space that is not Lindelof.
The Michael line as an example of a meta-Lindelof space is quite informative. Note that in any Lindelof space, all closed and discrete subsets must be countable (such a space is said to have countable extent). However, a meta-Lindelof space can have uncountable closed and discrete subset. There is a closed and discrete subset of the Michael line of cardinality continuum. To see this, note that there is a Cantor set in the real line consisting entirely of irrational numbers. For example, we can construct a Cantor set within the interval ![A=[\sqrt{2},\sqrt{8}]](https://s0.wp.com/latex.php?latex=A%3D%5B%5Csqrt%7B2%7D%2C%5Csqrt%7B8%7D%5D&bg=ffffff&fg=333333&s=0&c=20201002) . Let
. Let  enumerate all rational numbers within this interval. In the first step, we remove a middle part of the interval such that the two remaining closed intervals have irrational endpoints and will miss
enumerate all rational numbers within this interval. In the first step, we remove a middle part of the interval such that the two remaining closed intervals have irrational endpoints and will miss  . In the
. In the  th step of the construction, we remove the middle part of each of the remaining intervals such that all remaining intervals have irrational endpoints and will miss the rational number
th step of the construction, we remove the middle part of each of the remaining intervals such that all remaining intervals have irrational endpoints and will miss the rational number  . Let
. Let  be the resulting Cantor set, which consists only of irrational numbers since it misses all rational numbers in . The set , as a subset of the Michael line, is closed and discrete.
be the resulting Cantor set, which consists only of irrational numbers since it misses all rational numbers in . The set , as a subset of the Michael line, is closed and discrete.
The above paragraph shows one direction in which the two notions of “Lindelof” diverge. Lindelof spaces have countable extent. On the other hand, meta-Lindelof space can have uncountable closed and discrete subsets.
Example 5 actually presents a template for producing meta-Lindelof spaces. In Example 5, start with the real line with the usual topology. Identify a “Lindelof” part (the rationals) and make the remainder discrete (the irrationals). The template is further described in the following theorem.
Theorem 2
Let be a space and let  be a Lindelof subspace of . Define a new space
be a Lindelof subspace of . Define a new space  such that the underlying set is and the new topology is defined as follows. Let points
such that the underlying set is and the new topology is defined as follows. Let points  be isolated and let points
be isolated and let points  retain the original open sets in .
retain the original open sets in .
- Then the space is a meta-Lindelof space.
- If the original space is a non-Lindelof space, then is also not Lindelof.
To see with the new topology is meta-Lindelof, follow the same proof in showing the Michael line is meta-Lindelof. To prove part 2, let be an open cover of (in the original topology) such that no countable subcollection of is a cover of . Let  be a countable subcollection of such that covers . There must be uncountably many points of not covered by . Then
be a countable subcollection of such that covers . There must be uncountably many points of not covered by . Then  is an open cover of that has no countable subcover.
is an open cover of that has no countable subcover.
Example 6
This example starts with the space in Example 4. To define , let  , the product space of many copies of the real line . Let and be the subspaces of defined as follows:
, the product space of many copies of the real line . Let and be the subspaces of defined as follows:
The space is called the -product of lines and is collectionwise normal. Note that the -product of separable metric spaces is collectionwise normal (see here). The space is called the  -product of lines, which consists of all points in the product space with non-zero values in at most finitely many coordinates. Note that the -product of separable metric spaces is a Lindelof space (see here).
-product of lines, which consists of all points in the product space with non-zero values in at most finitely many coordinates. Note that the -product of separable metric spaces is a Lindelof space (see here).
The -product is not Lindelof because it contains a closed copy of (see here). Thus, is a non-Lindelof space with a Lindelof subspace , which is exactly what is required in Theorem 2. Define the space as described in Theorem 2. The resulting is meta-Lindelof but not Lindelof.
Note that the Lindelof is a dense subset of -product . Thus, though is not Lindelof, it has a dense Lindelof subspace. In Example 4, we see that is not meta-Lindelof since it contains a non-meta-Lindelof space as a closed subspace. However, re-topologizing it by making the points not in isolated and making the points in retain the open sets in the -product topology produces a meta-Lindelof space.
Concluding Remarks
A few observations can be made from the six examples discussed above.
- Among the separable spaces, meta-Lindelofness and Lindelofness are the same (Theorem 1). This gives a handy way to show that any separable space that is not Lindelof is not meta-Lindelof.
- It is possible that the product of Lindelof spaces is not meta-Lindelof (Example 1).
- A question can be asked for Example 2, which is a Moore space. Any Lindelof Morre space is second countable. Example 2 is not meta-Lindelof. Must a meta-Lindelof Moore space be second countable?
- The first uncountable ordinal with the order topology is not paracompact since it is not possible to cover the limit ordinals with a locally finite collection of open sets. The same idea shows that does not even satisfy the weaker property of meta-Lindelof (Example 3).
- One take away from Example 4 is that meta-Lindelof spaces resemble Lindelof spaces in one respect, that is, meta-Lindelofness is hereditary with respect to closed subspaces. Because the -product of the real lines contains a closed copy of , it is not meta-Lindelof.
- The Michael line (Example 5) demonstrates one critical difference between meta-Lindelof and Lindelof. Any Lindelof space has countable extent. It is different for meta-Lindelof spaces. In the Michael line, there is an uncountable closed and discrete subset. One way to see this is to construct a Cantor set in the real line consisting of only irrational numbers.
- The Michael line (Example 5) gives the hint of a recipe for producing meta-Lindelof spaces. The recipe is described in Theorem 2. Example 6 is a demonstration of the recipe. The -product discussed inExample 4 is non-Lindelof with a dense Lindelof subspace . By letting retain the original -product open sets and making the complement of discrete, we produce another meta-Lindelof space that is not Lindelof.
The rest of the remark focuses on the diagram given earlier (repeated belo
Theorem 1 shows that for separable spaces, meta-Lindelof Lindelof. As a result, the diagram becomes a closed loop, meaning all 4 notions in the diagram are equivalent for separable spaces. As pointed out earlier, CCC may be a good candidate for replacing separable since among CCC spaces, paracompactness equates Lindelofness. It turns out that for CCC spaces, meta-Lindelof does not imply Lindelof. A handy example is the Pixley-Roy space ![\mathcal{F}[\mathbb{R}]](https://s0.wp.com/latex.php?latex=%5Cmathcal%7BF%7D%5B%5Cmathbb%7BR%7D%5D&bg=ffffff&fg=333333&s=0&c=20201002) , which is non-Lindelof, metacompact (hence meta-Lindelof) and satisfies the CCC (see the follow up discussion in the next post). We found the following partial result in p. 971 of the Handbook of Set-Theoretic Topology (Chapter 22 on Borel Measures by Gardner and Pfeffer).
, which is non-Lindelof, metacompact (hence meta-Lindelof) and satisfies the CCC (see the follow up discussion in the next post). We found the following partial result in p. 971 of the Handbook of Set-Theoretic Topology (Chapter 22 on Borel Measures by Gardner and Pfeffer).
Theorem 3 (MA + not CH)
Each locally compact meta-Lindelof space satisfying the CCC is Lindelof.
Theorem 3 is Corollary 4.9 in the article in the Handbook. It implies that for locally compact CCC space, the above diagram is a closed loop but only under Martin’s axiom and the negation of CH.
The Handbook was published in 1984. We wonder if there is any update since then. For any reader who has updated information regarding the consistency result in Theorem 3, please kindly comment in the space below.
For more information on meta-Lindelof and other covering properties, see Chapter 9 in the Handbook of Set-Theoretic Topology (the chapter by D. Burke on covering properties).

Dan Ma topology
Daniel Ma topology
Dan Ma Lindelof spaces
Daniel Ma Lindelof spaces
Dan Ma meta-Lindelof spaces
Daniel Ma meta-Lindelof spaces
 2022 – Dan Ma
2022 – Dan Ma
Posted: 10/29/2022
Updated: 10/30/2022
Updated: 11/1/2022









is made an isolated point.
 where
where 
































































 be a quotient map. Let the map
be a quotient map. Let the map  be defined by
be defined by  for each
for each  . Then the map
. Then the map  to
to  .
. and
and  ,
,  is an open set in
is an open set in  is an open set in
is an open set in  . We proceed to find some open set
. We proceed to find some open set  such that
such that  .
. and an open set
and an open set  with
with  such that
such that  is compact and
is compact and  . We make the following observation,
. We make the following observation, ,
,  if and only if
if and only if 
 . By observation (1), we have
. By observation (1), we have  . Note that
. Note that  . Thus,
. Thus,  . As a result, we have
. As a result, we have  is open in
is open in 
 be the projection map. Since
be the projection map. Since  is a closed map according to the Kuratowski Theorem (see
is a closed map according to the Kuratowski Theorem (see  is closed in
is closed in  ,
,  is closed in
is closed in  is open in
is open in  . Thus,
. Thus,  such that
such that  be a quotient map from
be a quotient map from  defined by
defined by  . By Theorem 1,
. By Theorem 1,  , we establish that
, we establish that  be a quotient map from
be a quotient map from  by letting
by letting  . According to Theorem 1,
. According to Theorem 1,  , we establish that
, we establish that  such that each
such that each  is isolated and an open neighborhood of
is isolated and an open neighborhood of  with the usual Euclidean topology. Let
with the usual Euclidean topology. Let  be the topological sum of
be the topological sum of  , which is called a spine.
, which is called a spine. is always a sequential space. According to Corollary 4,
is always a sequential space. According to Corollary 4, 
 . In this Euclidean space, the points in the sequences
. In this Euclidean space, the points in the sequences 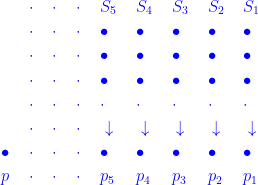
 with the quotient topology. With the quotient topology, an open set containing the point
with the quotient topology. With the quotient topology, an open set containing the point 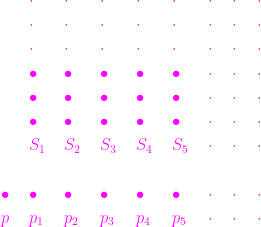
 consists of the point
consists of the point  . Note that no sequence of points in
. Note that no sequence of points in  . As observed in the preceding paragraph, no sequence of points in
. As observed in the preceding paragraph, no sequence of points in  be a mapping from a topological space
be a mapping from a topological space  if the following holds: for any mapping
if the following holds: for any mapping  , is a closed map if for any closed subset
, is a closed map if for any closed subset  is closed in
is closed in  is compact for each
is compact for each  be a closed map with
be a closed map with  . Then the set
. Then the set  is open in
is open in  .
. , define
, define  . By Lemma 3, each
. By Lemma 3, each  is an open subset of
is an open subset of  is an open cover of
is an open cover of  such that
such that  . Since
. Since  . It follows that
. It follows that  . Since
. Since  such that
such that  . For each
. For each  for some
for some  . We claim that
. We claim that  is a cover of
is a cover of  . This implies that
. This implies that  . Thus, the open cover
. Thus, the open cover  .
. . (1) It is an open cover of
. (1) It is an open cover of  such that
such that  and such that
and such that  such that
such that  and such that
and such that  intersects only finitely many elements of
intersects only finitely many elements of  . Let
. Let  . Clearly,
. Clearly,  ,
, ,
, . To see (3), let
. To see (3), let  where
where  . Then
. Then  for some
for some  . Let
. Let  . Then
. Then  . This implies that
. This implies that  . It follows that
. It follows that  , i.e., the weight of
, i.e., the weight of  be a map (or function) from
be a map (or function) from  is closed in
is closed in  be open. Let
be open. Let  is closed in
is closed in  . Note that
. Note that  is closed in
is closed in  . Let
. Let  . Then
. Then  for some
for some  . Since
. Since  and
and  , we have
, we have  . This implies that
. This implies that  .
. . Let
. Let  . Since
. Since  ,
,  . Choose
. Choose  , which implies that
, which implies that  .
. . We have
. We have  . As a result,
. As a result,  for some
for some  .
.  be a base for
be a base for  for
for  , i.e., the cardinality of
, i.e., the cardinality of  is a base for
is a base for  is defined in Lemma 2. Let
is defined in Lemma 2. Let  be an open set. Let
be an open set. Let  . For each
. For each  , choose
, choose  such that
such that  and
and  . Since
. Since  such that
such that  . Note that
. Note that  . Since
. Since  , we have
, we have  . We also have
. We also have  . Thus, every open subset
. Thus, every open subset  of
of  would be a base for
would be a base for  be the real line with the usual topology. Collapse the closed interval
be the real line with the usual topology. Collapse the closed interval ![[1,2]](https://s0.wp.com/latex.php?latex=%5B1%2C2%5D&bg=ffffff&fg=333333&s=0&c=20201002) to one point called
to one point called  . In
. In  are the usual Euclidean neighborhoods. The open neighborhoods of the point
are the usual Euclidean neighborhoods. The open neighborhoods of the point  ,
,  , which is not open in
, which is not open in  ,
,  , which is not open in
, which is not open in  ,
,  may not be open but has an open subset
may not be open but has an open subset  be a property of topological spaces. We say that
be a property of topological spaces. We say that  , if the space
, if the space  ” is an invariant of the perfect maps.
” is an invariant of the perfect maps. -space.
-space. such that
such that  . A network behaves like a base but the elements of the network do not have to be open sets. Of interest are the spaces with a countable network. Compact spaces with a countable network is metrizable. Any space with a countable network is both hereditarily separable and hereditarily Lindelof. The space
. A network behaves like a base but the elements of the network do not have to be open sets. Of interest are the spaces with a countable network. Compact spaces with a countable network is metrizable. Any space with a countable network is both hereditarily separable and hereditarily Lindelof. The space  with
with  . Let
. Let  be the x-axis, which is the set of all pairs of real numbers
be the x-axis, which is the set of all pairs of real numbers  . The bow-tie space is the set
. The bow-tie space is the set  with the topology defined as follows.
with the topology defined as follows. with
with  . Each set
. Each set  having Euclidean distance less than
having Euclidean distance less than  from
from  , respectively.
, respectively.
 be countable bases for
be countable bases for  is a network for the Bow-Tie space
is a network for the Bow-Tie space  be the upper half plane
be the upper half plane  be the x-axis
be the x-axis  , the free sum or free union. This means that
, the free sum or free union. This means that  is open if and only if both
is open if and only if both  and
and  are open. It follows that the identity map from
are open. It follows that the identity map from  onto the Bow-Tie space
onto the Bow-Tie space  ,
,  ,
,  ,
,  . Pick
. Pick  such that
such that  for all
for all  . Consider
. Consider  . Since
. Since  . This means that both the left side and the right side of the bow-tie in
. This means that both the left side and the right side of the bow-tie in  are within
are within  , the function space with the pointwise convergence topology on the Bow-Tie space
, the function space with the pointwise convergence topology on the Bow-Tie space  is a Lindelof
is a Lindelof  is a hereditarily D-space.
is a hereditarily D-space. from the space
from the space  is a closed map.
is a closed map. where
where  with
with  , which is not closed in
, which is not closed in  is clear. We prove
is clear. We prove  and
and  .
. is open in
is open in  . Note that
. Note that  . By the Tube Lemma (see
. By the Tube Lemma (see  . It follows that
. It follows that  . This means that
. This means that  is closed in
is closed in  (see
(see  . Let
. Let  . Define a topology on
. Define a topology on 
 are of the form
are of the form  where
where  is finite and
is finite and  . In words, we can describe the topology on
. In words, we can describe the topology on  . the intersection of finitely many sets in
. the intersection of finitely many sets in  for some
for some  . As a result,
. As a result,  and
and  are disjoint open sets separating
are disjoint open sets separating  and
and  be disjoint closed subsets of
be disjoint closed subsets of  and
and  where
where  . By assumption,
. By assumption,  is closed in
is closed in  . Since
. Since  , we have
, we have  . This means that
. This means that  . Furthermore, there exists
. Furthermore, there exists  such that
such that  . We claim that
. We claim that  for all
for all  . Consider the open set
. Consider the open set  , which contains the point
, which contains the point  . Since
. Since  , the open set
, the open set  . Thus
. Thus  for some
for some  . This means that
. This means that  and
and  . What we have just shown is that for every open set
. What we have just shown is that for every open set  ,
,  for all
for all  , which is compact. Thus, each point inverse of the projection map is compact.
, which is compact. Thus, each point inverse of the projection map is compact. ![\mathcal{F}[X]](https://s0.wp.com/latex.php?latex=%5Cmathcal%7BF%7D%5BX%5D&bg=ffffff&fg=333333&s=0&c=20201002) , which is always metacompact, hence meta-Lindelof. We then make sure the ground
, which is always metacompact, hence meta-Lindelof. We then make sure the ground ![F \in \mathcal{F}[X]](https://s0.wp.com/latex.php?latex=F+%5Cin+%5Cmathcal%7BF%7D%5BX%5D&bg=ffffff&fg=333333&s=0&c=20201002) and any open
and any open  , define
, define ![[F,U]](https://s0.wp.com/latex.php?latex=%5BF%2CU%5D&bg=ffffff&fg=333333&s=0&c=20201002) as follows:
as follows:![[F,U]=\{ D \in \mathcal{F}[X]: F \subset D \subset U \}](https://s0.wp.com/latex.php?latex=%5BF%2CU%5D%3D%5C%7B+D+%5Cin+%5Cmathcal%7BF%7D%5BX%5D%3A+F+%5Csubset+D+%5Csubset+U+%5C%7D&bg=ffffff&fg=333333&s=0&c=20201002)
 such that
such that  . This sounds like the definition of a base for a topology. Note that the sets in the network
. This sounds like the definition of a base for a topology. Note that the sets in the network ![\{ [F_\alpha,U_\alpha]: \alpha \in \omega_1 \}](https://s0.wp.com/latex.php?latex=%5C%7B+%5BF_%5Calpha%2CU_%5Calpha%5D%3A+%5Calpha+%5Cin+%5Comega_1+%5C%7D&bg=ffffff&fg=333333&s=0&c=20201002) be an uncountable collection of open sets in
be an uncountable collection of open sets in  such that
such that  . Since
. Since  such that
such that  for uncountably many
for uncountably many  and
and  . Then we have
. Then we have  and
and  . Note that the finite set
. Note that the finite set  belongs to both
belongs to both ![[F_\beta,U_\beta]](https://s0.wp.com/latex.php?latex=%5BF_%5Cbeta%2CU_%5Cbeta%5D&bg=ffffff&fg=333333&s=0&c=20201002) and
and ![[F_\gamma,U_\gamma]](https://s0.wp.com/latex.php?latex=%5BF_%5Cgamma%2CU_%5Cgamma%5D&bg=ffffff&fg=333333&s=0&c=20201002) . This completes the proof that the Pixley-Roy space
. This completes the proof that the Pixley-Roy space 

 , where
, where  be the listing of all the prime numbers. Suppose that
be the listing of all the prime numbers. Suppose that  converges. There is some positive integer
converges. There is some positive integer  such that
such that  . In the remainder of the proof, the prime numbers
. In the remainder of the proof, the prime numbers  are called small primes and
are called small primes and  are called big primes. For any positive integer
are called big primes. For any positive integer  , we have the following inequality:
, we have the following inequality:
 be the number of all positive integers
be the number of all positive integers  such that the prime divisors of
such that the prime divisors of  be the number of all positive integers
be the number of all positive integers  for all
for all  for some
for some  refers to the floor function, which is greatest integer less than or equal to
refers to the floor function, which is greatest integer less than or equal to  , which is identical to the number of positive integers
, which is identical to the number of positive integers  . We now have the following upper bound for
. We now have the following upper bound for 
 is square-free while
is square-free while  is not square-free. Note that any positive integer
is not square-free. Note that any positive integer  with
with  being square-free. If a positive integer is itself square-free, the square part is 1. Otherwise, we can always rearrange the prime decomposition to obtain
being square-free. If a positive integer is itself square-free, the square part is 1. Otherwise, we can always rearrange the prime decomposition to obtain  where
where  is square-free part. Each
is square-free part. Each  many different square-free parts
many different square-free parts  , we have
, we have  . The following is an upper bound on
. The following is an upper bound on 
 or
or  . A good choice is
. A good choice is  . With this particular
. With this particular 
 , which contradicts the fact that
, which contradicts the fact that  , are there arithmetic progression of primes of length
, are there arithmetic progression of primes of length 